交会定点中的三种角度交会法

 于 2023-06-03 00:01:19 发布
于 2023-06-03 00:01:19 发布
 阅读量2.9k
阅读量2.9k
 收藏
9
收藏
9


 点赞数
点赞数
点击上方“3D视觉工坊”,选择“星标”
干货第一时间送达

作者丨海子与风
来源丨 小小卷屋
在山区和地形复杂地区,传统的钢尺量距有困难。因此在山区或通视条件良好地区,可采用经纬仪角度交会来加密测图控制点。
经纬仪角度交会图形结构和外业工作简单,只测角不量边,不仅适用于地形测量,而且在矿区地面测量和地质探程中也经常使用。
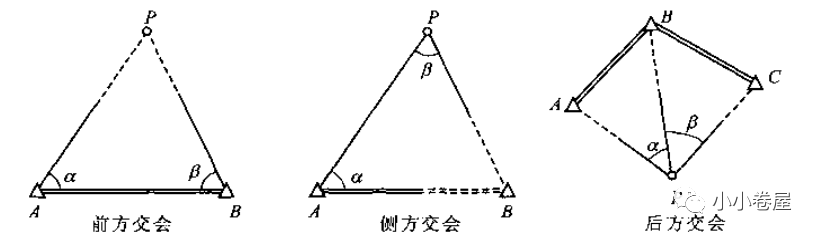
经纬仪交会法按其布设形式分为前方交会、侧方交会和后方交会,如下图所示。
01
前方交会
前方交会采用经纬仪在已知点A、B上分别向新点 P 观测水平角,进而计算P点坐标。但为了检核,需要从3个已知点分别向新点进行角度观测,由2个三角形分别解算 P 点坐标。为提高交会定点的精度,选择 P 点时应尽可能使交会角γ接近90°,并保证30°≤γ≤150°。

前方交会
前方交会计算步骤
1.坐标反算:根据两个已知点坐标反算已知边边长和坐标方位角。坐标反算的公式为:
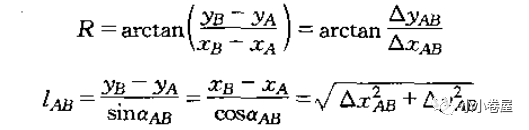
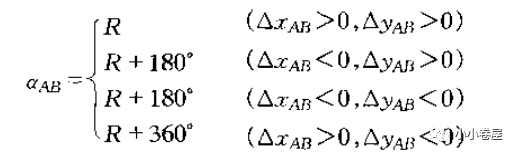
值得注意的是,按式①式计算的角度变化范围为 -90° ~ +90°,与坐标方位角的变化范围(0°~360°)不一致,因此需要根据坐标增量的正负号或直线所在的象限来确定坐标方位角。
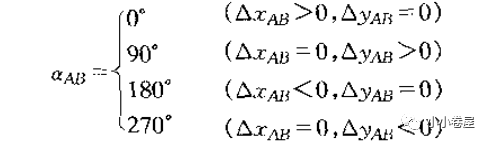
若直线恰巧位于坐标轴上,那么,
2.计算交会角γ:
γ=180°-(α+β)
3.计算边长:
根据方位角传播律,可推得,

根据正弦定理,可得边长,

4.计算坐标:分别由A、B两点推算 P 点坐标。
用以上两个式子计算所得的 P 点坐标理论上应相等。但由于计算过程中数字凑整的影响,可能会产生2~3mm的差值,可取二者的平均值作为 P 点的坐标。
当使用计算器计算 P点坐标时,根据,

因此有,

即,

将上式分子分母同时除以 sinαsinβ,并且代入

可得,


上式被称为前方交会法的余切公式。
02
侧方交会
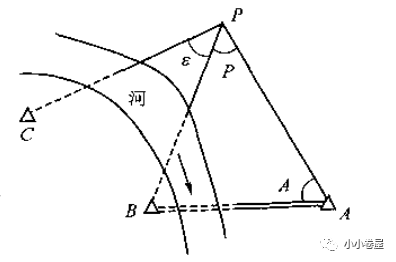
侧方交会实质与前方交会相同,都是利用两个高级控制点测定另一个未知点的坐标。不同的是侧方交会利用便于安置仪器的一个已知点 A 和未知点 P,观测水平角 A 和角 P,利用已知点 A、B的坐标推算 P 点的坐标,如下图所示。
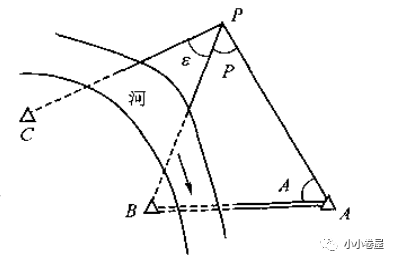
角度侧方交会
为了便于检核测量精度,仪器在 P 点安置时,除了观测角 P 外,还要瞄准第三个已知点 C 观测检验角ε,以作检核之用。
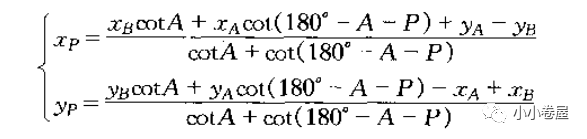
仿照前方交会法的计算公式,可得侧方交会的 P 点坐标计算公式为
03
后方交会
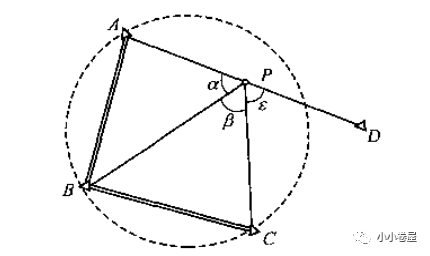
如下图所示,为确定 P 点坐标,将仪器安置在 P 点,观测水平角α、β和检验角ε,利用水平角α和A、B、C、三个已知点的坐标计算 P 点的坐标,同时用检验角 ε 检验测量成果的精度。
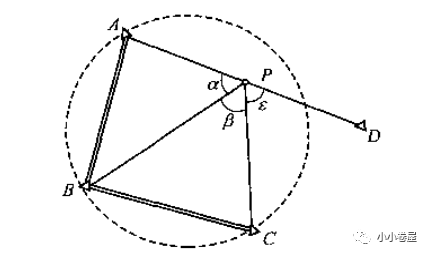
后方交会与危险圆
后方交会的优点是仅需在待定点 P 上安置仪器,可以节省时间和减少工作量。因此在地质勘探中确定钻孔孔位以及露天矿地面测量中经常采用。
后方交会的应用条件是需要 4 个已知控制点,且待定点 P 不能位于已知点A、B、C所构成的圆周上(危险圆)或圆周附近,否则将计算不出结果或计算结果误差很大。
04
三者区别
简言之,前方交会、侧方交会、后方交会这三种角度交会法的区别在于:
1.前方交会:已知A、B两点的坐标,观测∠A(图中∠α)和∠B(图中∠β),即可测定未知点P的坐标。

2. 侧方交会:已知A、B两点的坐标,观测∠A和∠P或∠B和∠P,即可测定未知点P的坐标。
3.后方交会:在未知点P上瞄准A、B、C三个已知点,测得∠α和∠β,即可测定未知点P的坐标。
添加小助理微信dddvisiona, 即可加入「SLAM」微信群。
如何高效学习3D视觉技术?
原创文章投稿邀请
工坊特邀讲师招募
3D视觉精品课程,包括相机标定、SLAM、结构光、三维重建、自动驾驶、三维点云、机械臂抓取等
















 4864
4864











 暂无认证
暂无认证



















 到【灌水乐园】发言
到【灌水乐园】发言










Ar夏之彤: 你好,请问你找到源码了吗,我也在找这个
飒馍噎: 请问下课程对实操帮助大吗
xxhdm: 博主您好,视觉建图过程中,栅格地图随着小车的移动而移动时什么原因呢?
FlyingAnt_: 这节课老师听得我头大,一句话中的几个字一直重复,脑袋快炸了
Ayo ~~: 小目标检测