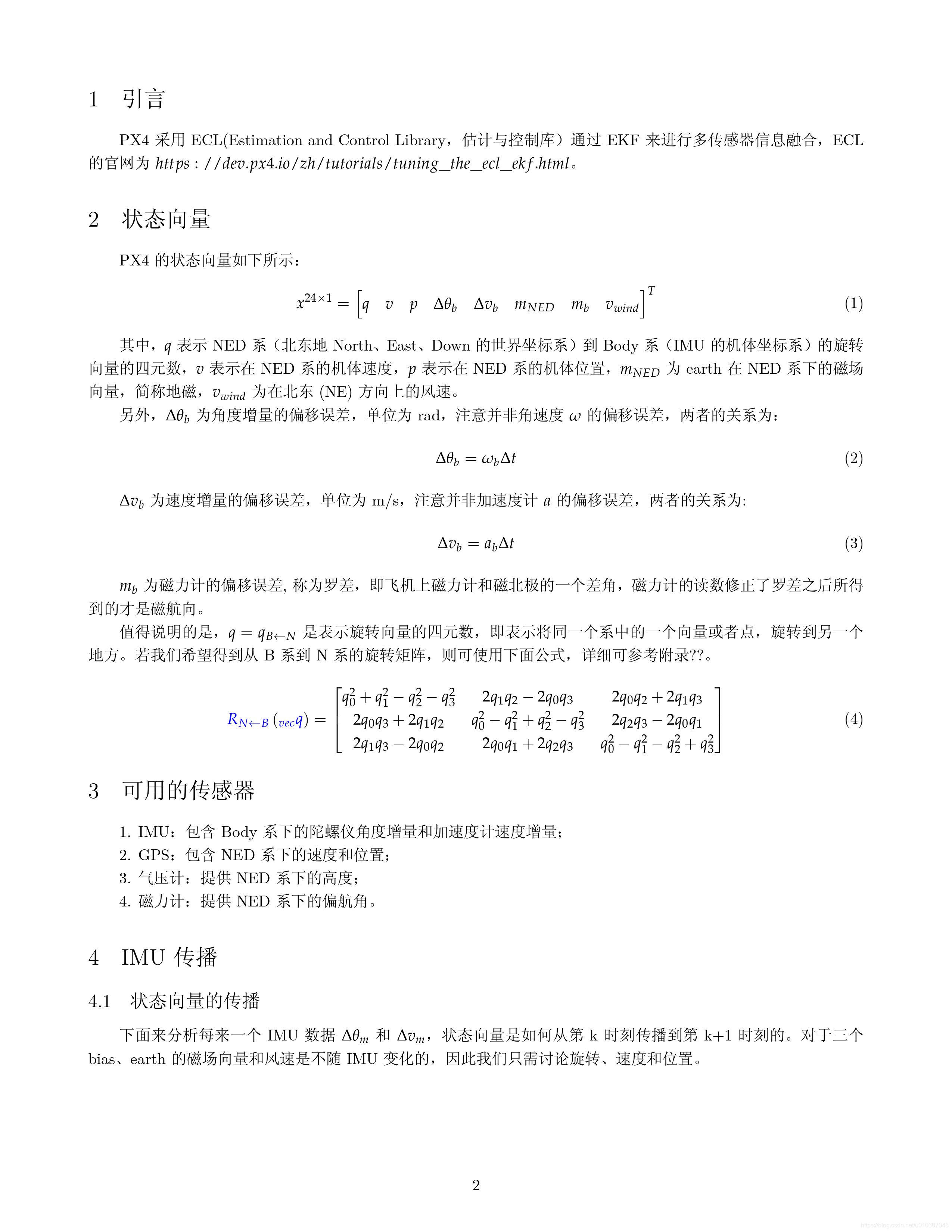
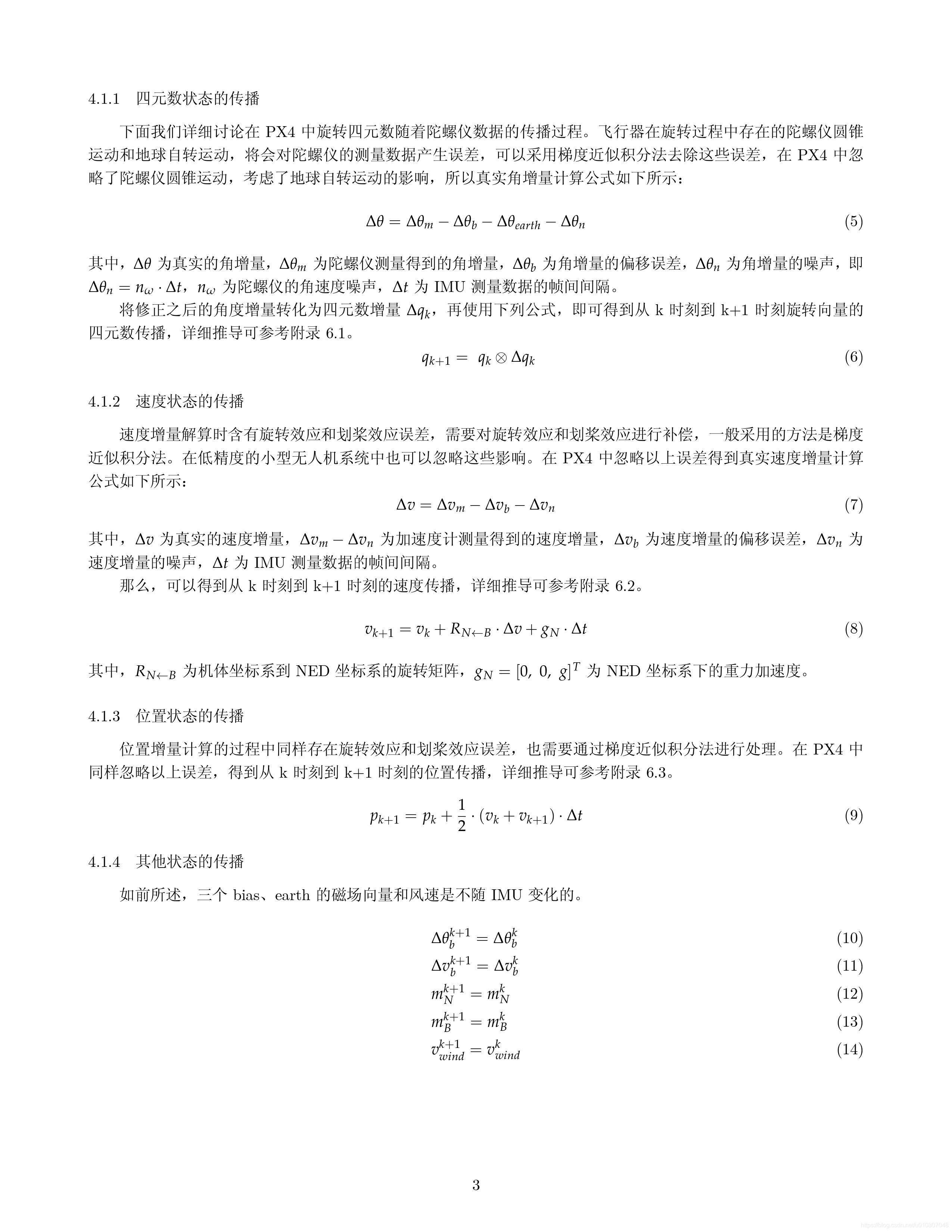
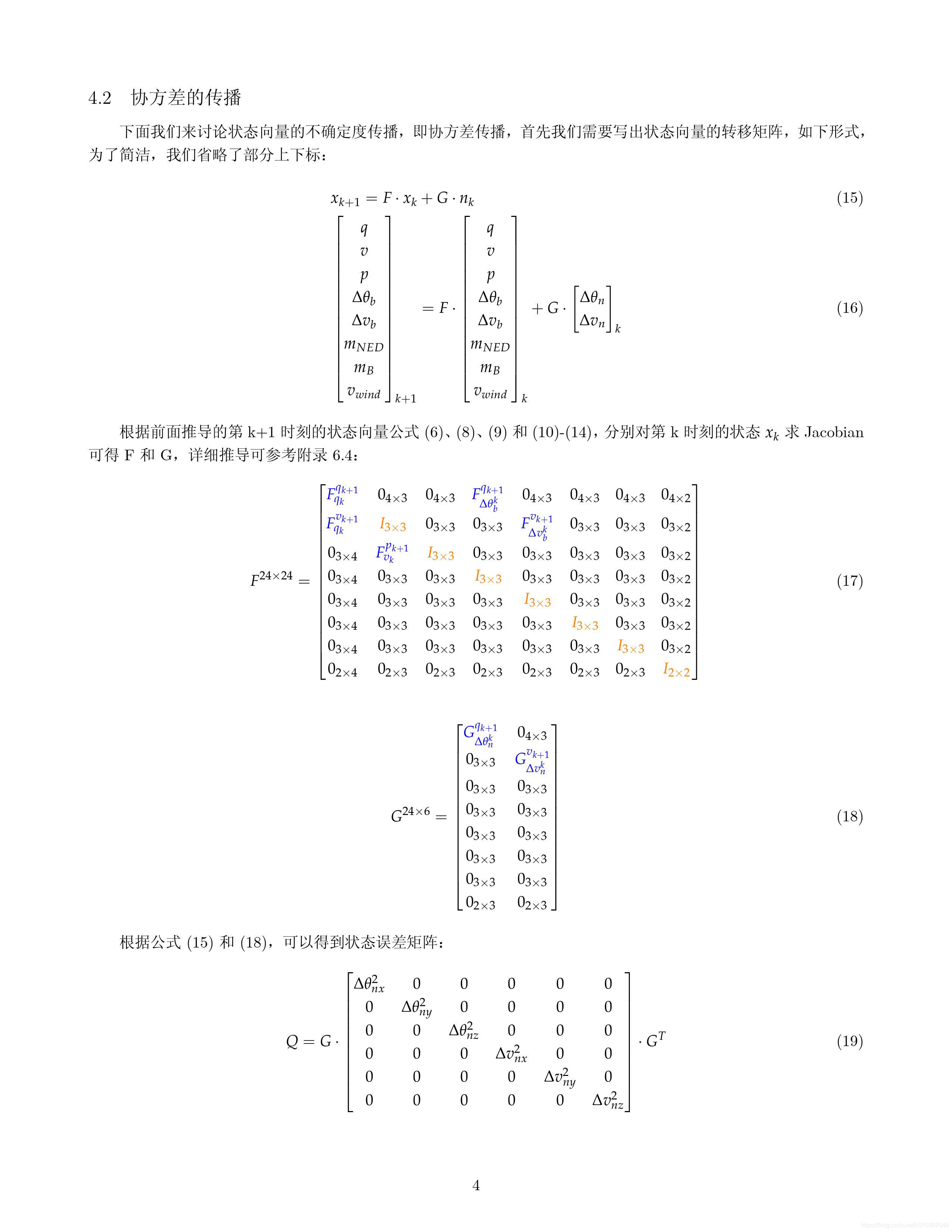
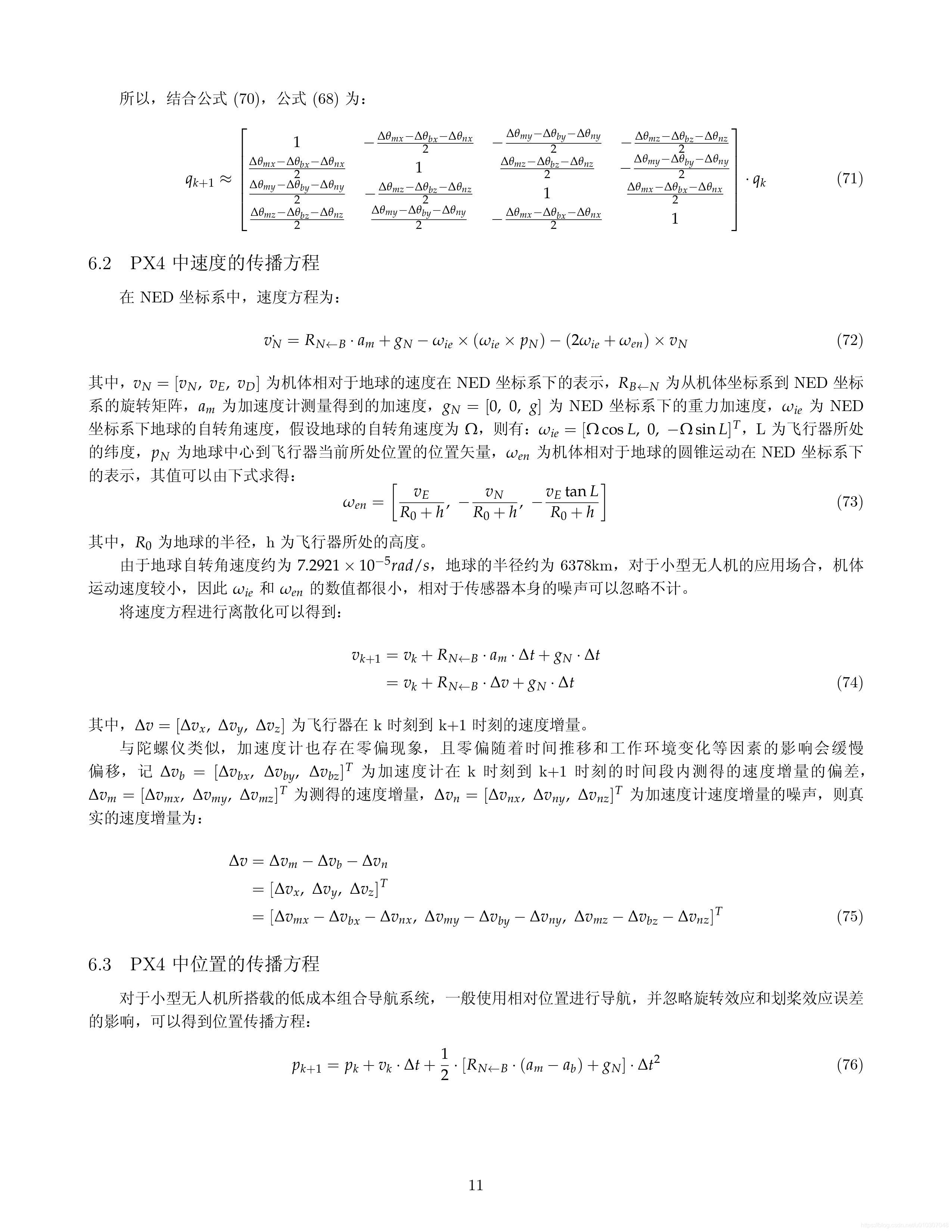
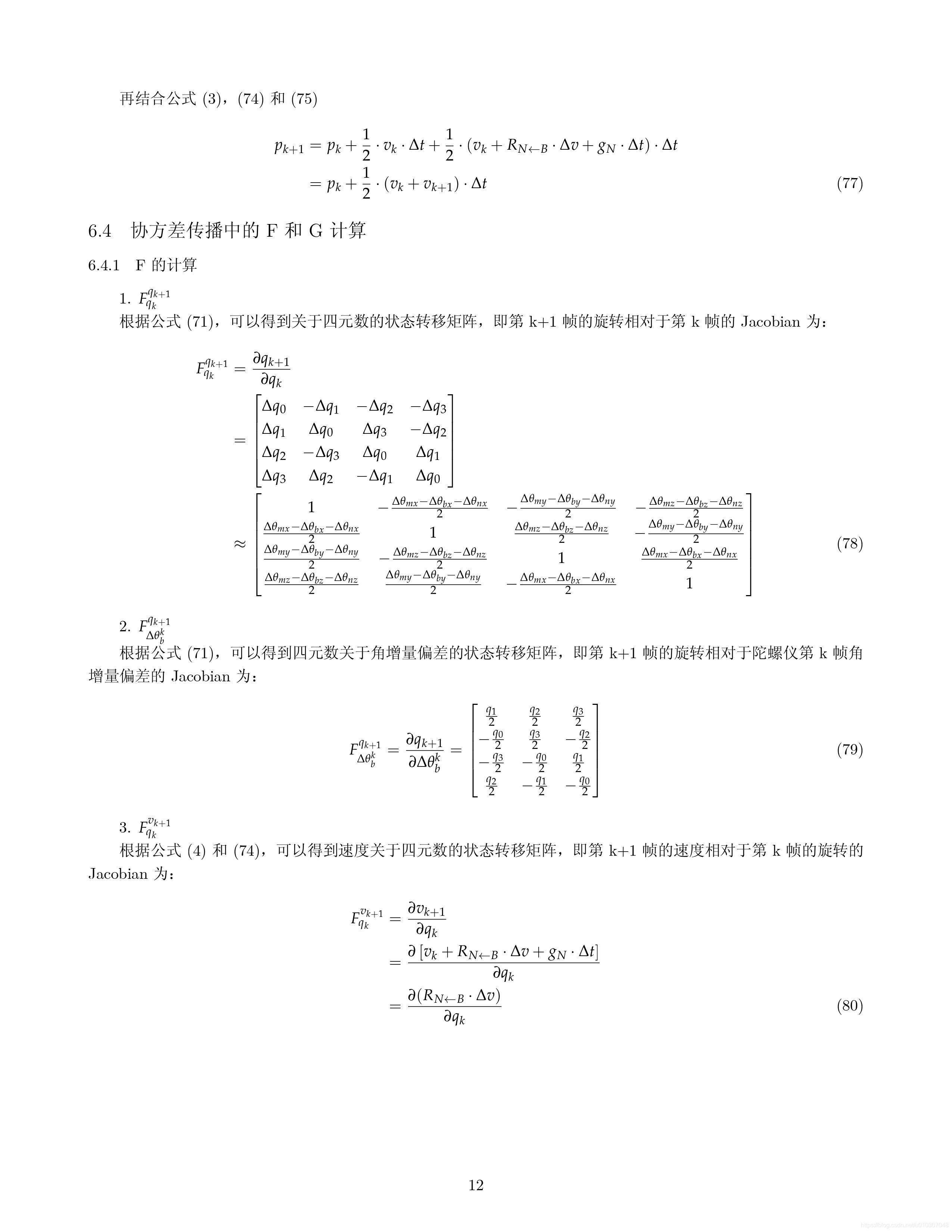
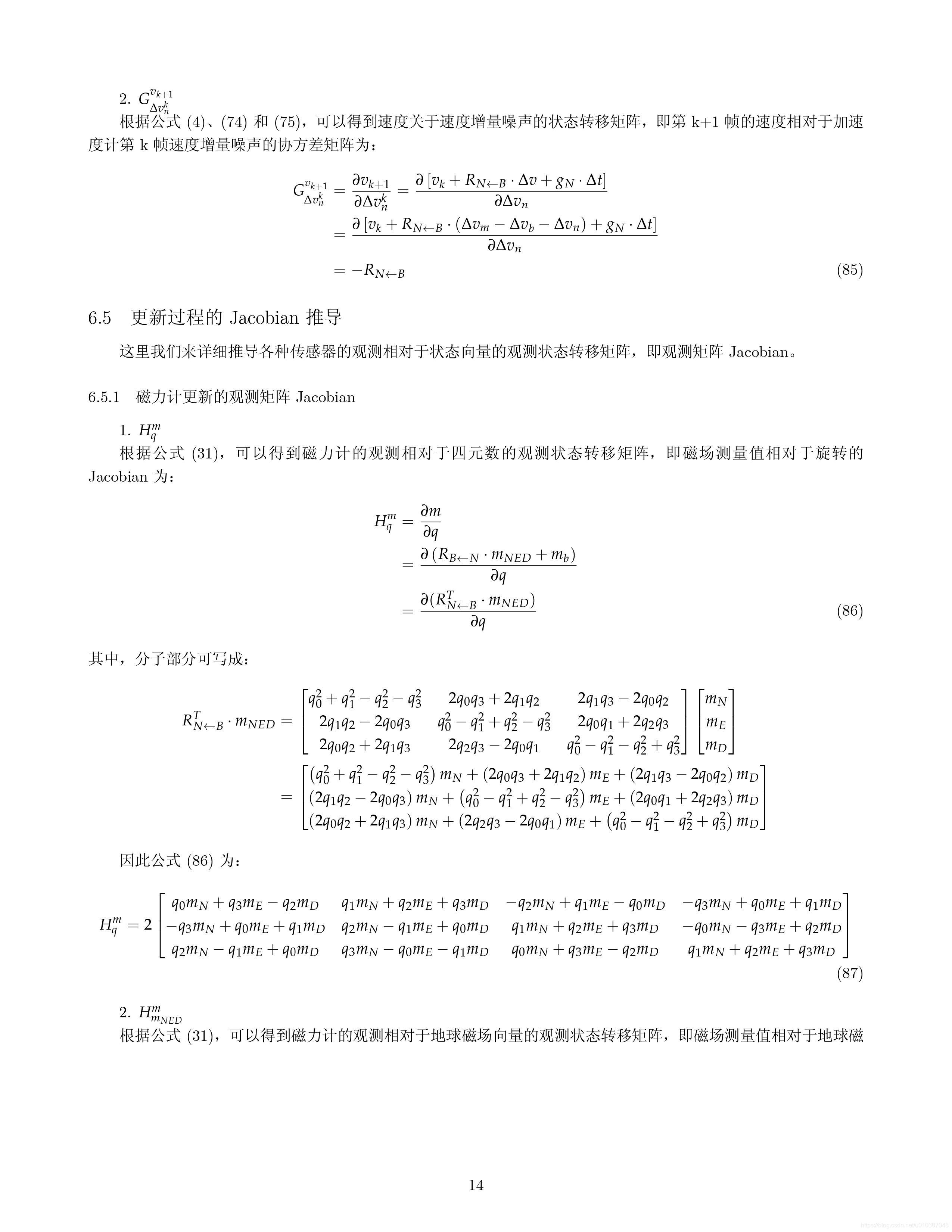
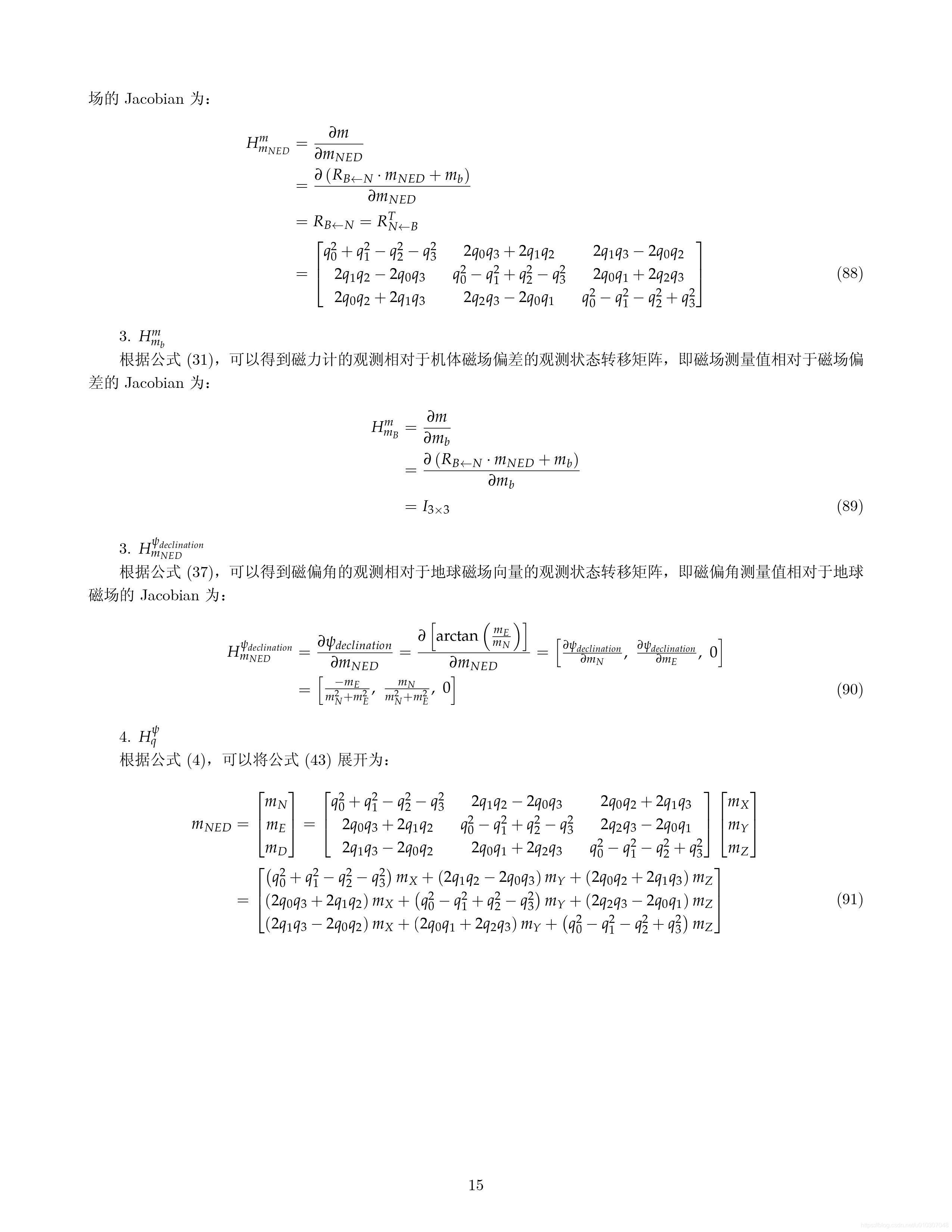
PX4 的 ECL EKF 公式推导及代码解析

置顶
无用闲士
 已于 2022-04-26 14:21:25 修改
已于 2022-04-26 14:21:25 修改
 阅读量8k
阅读量8k
 收藏
108
收藏
108
 点赞数
48
点赞数
48
已于 2022-04-26 14:21:25 修改
阅读量8k
收藏
108

 点赞数
48
点赞数
48
于 2019-09-05 10:52:12 首次发布




如有谬误,请联系指正。转载请注明出处。
联系方式:
e-mail: ericzzj@163.com
github: https://github.com/ericzzj1989/matlab_px4_msf

















 1745
1745










 暂无认证
暂无认证



















 到【灌水乐园】发言
到【灌水乐园】发言










HeEureka: 您好!请问您有人脸皮肤相关的反射率数据集吗?非常感谢!
zhy61718: https://www.cse.psu.edu/~rtc12/CSE486/lecture19.pdf
FrozenFreak: 大佬,3.51这个式子可以推导一下吗?
HO85: 你好,为什么关于相机点 P 的相对速度V是等于-T-w×P,变成负号
浅度学习#%*@: 请问代价计算的那个折线图是怎么做的呀?