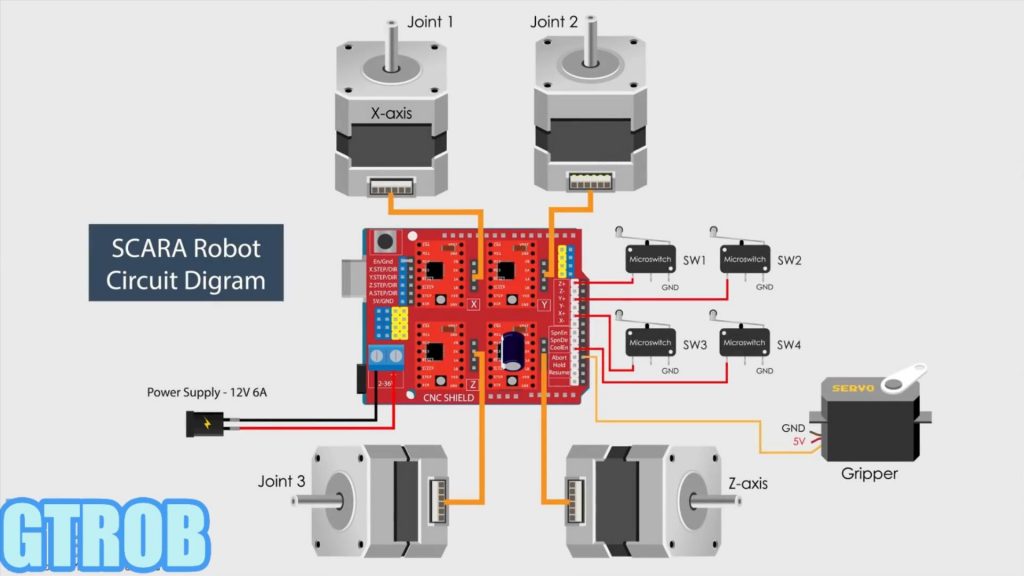
该机器人有 4 个自由度,由 4 个 NEMA 17 步进电机驱动。此外,在这种情况下,它还有一个小型伺服电机,用于控制末端执行器或机器人抓手。这个 SCARA 机器人的大脑是一块 Arduino UNO 板,它与一个 CNC 屏蔽板和四个用于控制电机的 A4988 步进驱动器配对。

机器人的大部分零件都可以 3D 打印。因此,您可以在具有较小打印床的 3D 打印机上进行 3D 打印。GT2 滑轮也可 3D 打印。使用参数化设计来制作它们,因此如果需要,我们可以轻松更改它们的尺寸。我们只需要更改齿数,所有尺寸都会自动更新以使皮带轮尺寸合适。
对于第一个关节,我们有 20:1 的减速比,通过这些定制设计的滑轮分两个阶段实现。我在这里使用的两条 GT2 皮带是闭环的,长度分别为 200 毫米和 300 毫米。机器人关节由两个推力轴承和一个径向轴承组成。
对于第二个关节,我们有 16:1 的减速比,以同样的方式实现,而第三个关节的减速比为 4:1,只需单级减速。接头是空心的,所以我们可以用它来穿过电机和微动开关的电线。对于每条皮带,都有插槽,我们可以在这些插槽上安装惰轮以张紧它们。
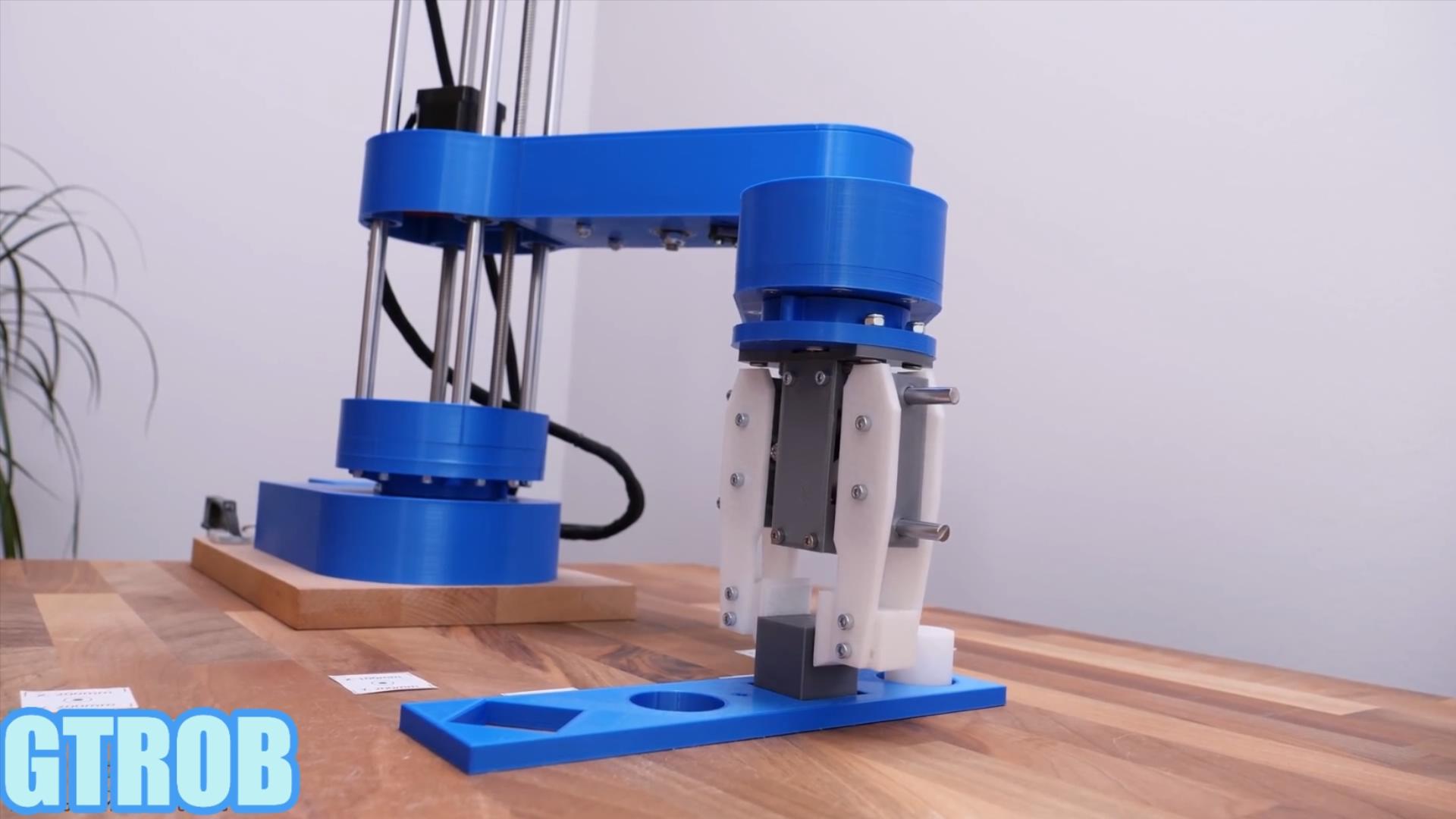
机器人夹持器由 MG996R 伺服电机驱动,我们可以轻松更改夹持器端部以实现不同的夹持尺寸。机器人的 Z 轴由 8mm 丝杠驱动,而整个手臂组件在四个 10mm 光滑杆和线性滚珠轴承上滑动。机器人的高度仅取决于光滑杆的长度,在这种情况下为 40 厘米。丝杠需要短 2 厘米才能适应这种配置,否则,可以使用间隔螺母将 Z 电机升高 2 厘米。
您可以在下方下载 3D 模型用于 3D 打印的 STL 文件。
对于大多数零件,我使用 PLA+ 材料,蓝色材料,以及用于滑轮和夹具的普通 PLA。我花了大约 120 个小时以 60 毫米/秒的打印速度打印所有部件。底座是打印的最大部分,大约需要 32 小时。但是,如果我们提高打印速度,我们肯定可以更快地打印零件。
只是在这里快速说明一下,我在切片软件中启用了 –0.1mm 的水平扩展打印了所有这些。这使零件具有更精确的尺寸,并与轴承、杆和螺栓等其他机械零件更好地配合。
这是组装这个基于 Arduino 的 SCARA 机器人所需的组件列表。电子元件的列表可以在文章的电路图部分找到。
- 4x 光滑杆轴 – 10mm 400mm
- 1x 丝杠 – 8mm 400mm
- 4x 直线轴承 10mm
- 1x 推力球轴承 40x60x13mm
- 2x 推力球轴承 35x52x12mm
- 5x 径向滚珠轴承 8x22x7mm
- 各种长度的 M3、M4 和 M5 螺栓和螺母
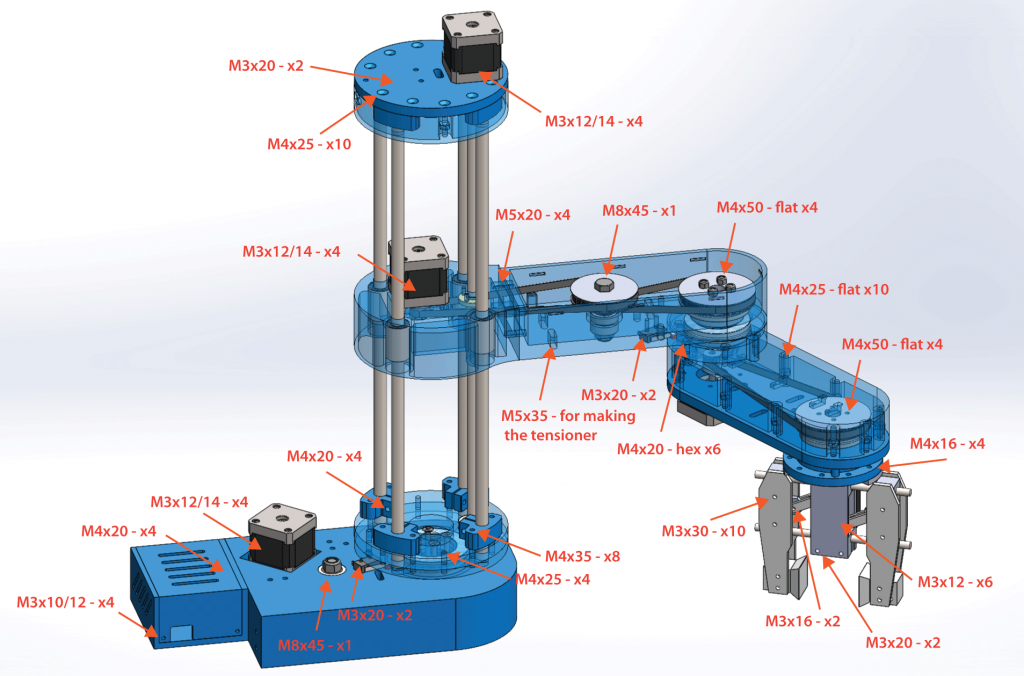
以下是该项目所需的螺栓尺寸:
这是这个 SCARA 机器人的电路图以及一切需要如何连接:
您可以从以下链接获取此项目所需的组件:
- 步进电机 – NEMA 17
- A4988 步进驱动器
- Arduino CNC 扩展板
- Arduino Uno
- MG996R伺服电机
- 限位开关
- 直流电源
为机器人供电,我们需要能够提供最低 4A 电流的 12V 电源,但我建议使用 12V 6A 电源。当然,这取决于步进驱动器的电流限制是如何设置的,我建议将其设置在尽可能低的水平。
所以最后,一旦我们将代码上传到 Arduino,我们就可以运行处理程序,连接电源,scara 机器人将开始移动到它的原始位置。
从那以后,我们可以为所欲为。我们可以手动播放或将其设置为自动工作。当然,我们可以附加任何类型的末端执行器并用它制作很酷的东西。例如,我们甚至可以将 3D 打印机的热端连接到机器人上,使机器人成为 3D 打印机,或者连接激光头,使其成为激光切割机。我确实计划尝试这两个想法,因此请确保您订阅我的频道,以免在我以后的一些视频中错过它们。
免费注册会员后 点击免费领取3D打印文件吧
注册后免费下载 SCARA 机器人 3D 打印STL 文件
有没有已经开始做的
请问电脑连接机械臂后是用什么软件做的调试?