经典环节中 惯性环节 的物理意义?
3 个回答

我尝试着回答了一下这个问题,先说结论:我觉得这名字取得一点都不好,我建议你不要在意,只是个名字而已。比起惯性的含义,我认为惯性环节本身自带负反馈闭环的这个性质更重要。
-------------一开始尝试的回答
思来想去,惯性环节好像没有对应的英文表述,有人知道的话麻烦告诉我一下。在我看来,在英文教材中,惯性环节就是一阶系统(First Order System)。
那就从中文的意思去理解一下。
牛顿第一运动定律说,物体在不受到外力的情况下,将做匀速运动。这句话又可以转述为,物体具有惯性——即保持其当前运动状态的“倾向”。设某物体的运动方程为
\[m\frac{d}{{dt}}v = F - Bv\]
可以写成下述传递函数(一阶系统):
\[v = \frac{{\frac{1}{m}}}{{s + \frac{B}{m}}}F\]
一般的一阶系统的阶跃响应长这样:
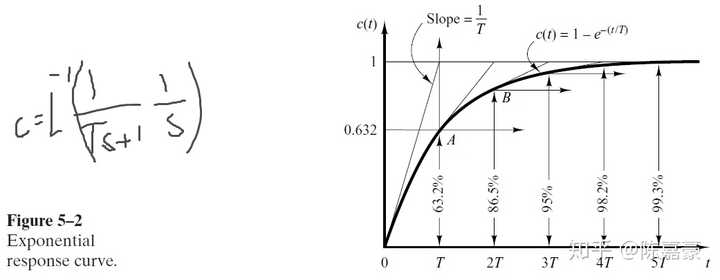

可能两者有所联系吧。
至少比起传递函数为 1 的系统,这个响应波形至少体现出了一丝丝的不情愿。


RC电路就是典型的惯性环节

先说明下惯性
一切物体都将一直处于静止或者匀速直线运动状态,直到出现施加其上的力改变它的运动状态为止
写成公式 v_{a}-v_{b}=\bar{a}\Delta t
其中 v_{a}代表末速度,v_{b} 代表初速度,\bar{a} 代表平均加速度,\Delta t 代表加速度作用的时间,其中 \bar{a} 就是惯性的体现,它表示速度变化的快慢,根据牛顿第二定律,我们也可以说: \bar{a} 也可以用来衡量物体运动状态改变的难易。
好啦,我们向控制领域推广一下,我们将等式左边的 v_{a} 和 v_{b} 分别用r(t)和c(t)来表示,而对于一个系统来说,系统的惯性也就是当前状态下系统维持自身状态的能力,对于有向曲线来说,切线的方向就是该点的方向。(举个通俗点的例子就是切钢管时,火星总是沿着飞轮切向方向飞),我们向系统中输入c(t)系统输出r(t),在系统输出r(t)时c(t)可作为系统本身的特性存在,我们知道,系统总有保持自身状态的能力,而那时的状态便是 \frac{dc(t)}{dt} ,
同时我们也知道, \Delta t 由系统内部结构决定,所以我们不妨将它写成T,所以我们得到这样一个式子
r(t)-c(t)=\frac{dc(t)}{dt}T
通常情况下,我们可以通过某些技术手段(比如用小齿轮带动大齿轮,用运算放大器等方式实现对r(t)的放大,即Kr(t),我们将式子整理一下,可以得到
T\frac{dc(t)}{dt}+c(t)=Kr(t)
从公式上看,我们发现一阶惯性环节的特点,r(t)是由c(t)和c(t)的导数构成的线性组合构成的,推广到n阶便是由c(t)的0到n阶导数构成的线性组合构成的。
其实,我们可以将惯性环节视为微分环节的推广,我们知道理想微分环节很难实现,所以如果对大部分微分环节进行精细的建模,我们可以将其视为一个惯性环节,当然这不是本文重点,暂且不提。