
旋转机械振动常用语

相位
相位是在给定时刻振动体被测点相对于固定参考点的位置,单位是度[°]。
相位是振动在时间先后关系上或空间位置关系上相互差异的标志(例如同一部件不同位置处的振动或不同部件之间的振动),相位在判断振动故障的类型中有着非常重要的作用,在动平衡技术中更是必不可少。
把转子旋转一圈的时间看成是360°,两个振动之间的相位差就是转过此角度的时间差。通过角度不仅表示空间、而且表示时间,这便是相位的奥妙之处。
键相器
键相器是由探头(如涡流式、光电式等)与轴上固定标志(如键槽、凹孔、反光板等)所组成的相位测量仪表。
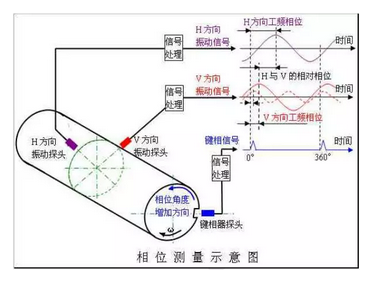
当轴上固定标志经过键相探头时,键相器便会触发一个脉冲信号,脉冲信号是确定各测点(如1H、1V、2H、2V…)、各选频振动(如工频、二倍频、0.5倍频…)相位的基准,脉冲频率与转子旋转频率完全同步。
绝对相位
绝对相位是指从键相器脉冲信号触发到各选频振动信号第一个正峰值之间的角度。
绝对相位是具体测得的相位,习惯上简称相位。说“某测点、某频率的相位为某某度”指的就是绝对相位,也就是相对于轴上固定标志通过键相探头的那一时刻及位置,此频率的最大振动与该测振探头之间的角度。
如果没有指明,相位角度增加的方向总是与转子的旋转方向相反。
由键槽和键相探头的位置及转子旋向,绝对相位还能给出最大振动具体的空间方位。例如,在上图中,由于在H点测得的工频相位为45°,V点相位为135°,因此,工频的最大振动方位(即转子与测振探头距离最近时的角位置,又称高点)与轴上键槽的夹角为180°。而且,再进一步,还可以根据转速以及转子状况指出不平衡量(又称重点)的具体方位,例如刚性转子高点与重点大致在同一方向,挠性转子在高于并远离临界转速后高点与重点相差180°。
相位差、相对相位
相位差是两个振动的相位之差。
相对相位是两个选频振动信号波形最近对应点(如正峰与正峰)之间的角度。
在实际应用中,往往并不讲相对相位,而只讲相位差,是因为实际上已经将相对相位所强调的“最近的对应点”溶进了相位差中。例如,假设H点、V点工频相位分别为3°、358°,它们之间的相位差既可以讲为355°,也可以讲为5°,而讲相位差为5°可能更使问题清晰。
通过相位(差),可以很具体地想象到两个振动矢量在时间和空间上的相互关系:
谁先谁后:相位小的在先、称超前,相位大的在后、称滞后,因为相位小的先到达第一个正峰、即最大振动点处;
相差的时间t:t=相位差×周期/360=相位差/(工频×360),实际中很少算,主要是由相位差(角度)的大小想象两者间隔时间的长短;
空间位置:相位差就是空间方向差夹角的角度。
相位差表面上看是一个角度,实际上是反映了两个振动在时间先后关系上或空间位置关系上,是否存在差异、存在什么差异、存在多大差异。在分析振动原因和判断振动故障类型时,往往更关注相位差,而不是相位。
例如,对于工频异常的振动故障,在分析振动原因、区分故障类型时,相位差可以更清晰地表明振动过程中各位置处的相互关系。仍然拿上图中测得的工频相位来说,测点H处的相位为45°,测点V处的相位的为135°,H点处的振动超前 V点处90°,俩测点的相位差为90°,表明H、V处的最大振动不同时,相差的时间正好是转子转过俩测点的时间(俩测点相互垂直,正好是90°),很可能是不平衡问题;另外,假设H点、V点工频相位都为0°,那么则表明在H点、V点测得的工频最大振动是同时、同方位的,此工频的最大振动方位始终在垂直方向的上方,与键相探头成90°夹角,因此,肯定不可能是不平衡问题,而可能是轴承的间隙