几何中的杠杆原理

摘要:本文将会探讨几何中的比例问题,并引入一个叫做“杠杆原理”的方法,它是将物理中的杠杆构造在几何图形中,并使用杠杆平衡条件来用已知比例求解未知比例的问题。
在几何证明与计算中,我们常常会遇到一些有关比例的问题,比如平面几何中比较著名的梅涅劳斯逆定理和塞瓦定理就是用比例来描述的。求解和证明比例问题,我们可以使用初中就学习过的三角形相似的知识,也可以使用高中里学习过的向量知识,或者是与三角形相关的正余弦定理以及各种边长、面积等的计算公式来推导,又或者是使用解析几何的办法,这些都是求解比例问题的一般方法,不过在本文中,我们将会使用一种物理学的方法,叫做杠杆原理。
我们以一个平面几何中典型的比例求解问题为引子来讲述。如下图所示:
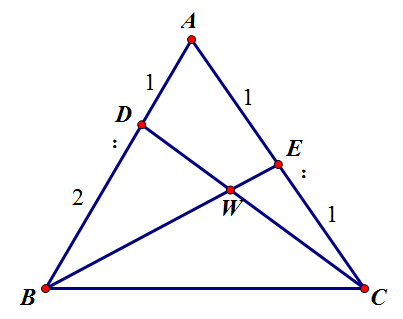
这个问题,使用梅涅劳斯逆定理最为简单,在\triangle ABE中,把线段CD看成是梅氏线,则有\frac{AD}{DB}\cdot \frac{BW}{WE}\cdot \frac{EC}{CA} = 1,根据已知的比例,则有\frac{1}{2}\cdot \frac{BW}{WE}\cdot \frac{1}{1+1} = 1,所以\frac{BW}{WE} = \frac{4}{1},同理,在\triangle ACD中,有\frac{AE}{EC}\cdot \frac{CW}{WD}\cdot \frac{DB}{BA} = 1,即\frac{1}{1}\cdot \frac{CW}{WD}\cdot \frac{2}{2+1} = 1,所以\frac{CW}{WD} = \frac{3}{2}。
至于使用三角形相似与向量等方法,读者可以自行构造辅助线和向量来推导,这些方法显然比梅涅劳斯逆定理要复杂些,这里就不再演示了。顺便在这里提一下,我们曾经在 《三角形中的三角形》一文中给出了梅涅劳斯逆定理的证明,这里我们给出用相似三角形的证明方法作为本文的补充,日后在讲到解析几何时,我们会给出另外的解析证法。


如上图所示,直线l与\triangle ABC的AB边交于P点,与BC边延长线交于Q点,与AC边交于R点,作BD\bot l与D点,作AE\bot l于E点,作CF\bot l于F点。
于是由垂直于同一直线的直线相互平行,这样就会有一组三角形相似,即\triangle AEP\sim \triangle BDP,\triangle AER\sim \triangle CFR,\triangle CFQ\sim \triangle BDQ。
所以有:\frac{AP}{PB} = \frac{AE}{BD},\frac{RA}{CR} = \frac{AE}{CF},\frac{CQ}{QB} = \frac{CF}{BD}
所以:\frac{AP}{PB} \cdot \frac{BQ}{QC} \cdot \frac{CR}{RA} =\frac{AE}{BD} \cdot \frac{BD}{CF} \cdot \frac{CF}{AE} =1
证毕。
下面我们来使用杠杆原理,我们知道杠杆平衡的条件是:动力乘以动力臂等于阻力乘以阻力臂。如果杠杆两边放的都是有质量的物体,那么动力和阻力就都成了重力,而重力和质量是成正比的,因此杠杆的平衡条件就是动力质量乘以动力臂等于阻力质量乘以阻力臂。

我们可以把杠杆平衡的条件应用到几何图形中去,我们以开头的问题为例进行说明。
首先,将线段ADB看做一个杠杆,D点看做是支点,A点看做是杠杆的一端,B点看做是杠杆的另一端,由杠杆平衡条件,则有m_A\cdot AD = m_B\cdot BD,而AD:BD=1:2,所以m_A:m_B = 2:1,我们不妨就设A点质量为2,B点的质量为1,由于支点承担整个杠杆的重量,所以m_D = m_A+m_B = 3,即D点的质量为3。
其次,再将线段AEC看做一个杠杆,E点看做是支点,A点看做是杠杆的一端,C点看做是杠杆的另一端,由杠杆平衡条件,则有m_A\cdot AE = m_C\cdot CE,而AE:EC=1:1,m_A=2,所以m_C = 2,即C点质量为2,支点E集合了整个杠杆的质量,所以m_E = m_A+m_C = 4,即E点质量为4。
然后,再以线段BWE为杠杆,W点为支点,点B为杠杆的一端,点E为杠杆的另一端,由杠杆平衡条件m_B\cdot BW = m_E\cdot WE,而m_B = 1,m_E = 4,所以有BW:WE = 4:1。此时,支点W集中了杠杆的全部质量,所以m_W= m_B+m_E = 1+4 =5,即W点的质量为5。
最后,再将线段CWD作为杠杆,W点为支点,点C为杠杆的一端,点D为杠杆的另一端,由杠杆平衡条件m_C\cdot CW = m_D\cdot WD,而m_C = 2,m_D = 3,所以CW:WD = 3:2,此时,支点W集中了整个杠杆的质量,所以m_W=m_C+m_D = 2+3=5,与使用杠杆BWE得到的结果一样。
杠杆原理求解的过程和原理可以参看下面的示意图(括号里的数值是对应点的质量):
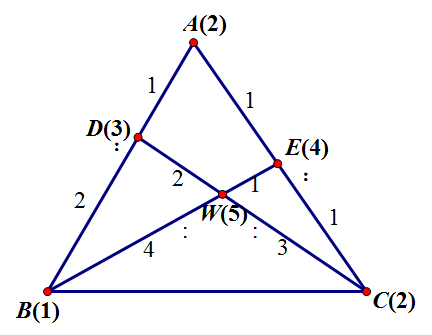

这样我们就用杠杆原理解出了开头的问题,与梅涅劳斯逆定理得到的答案完全一致。
那么这样使用杠杆原理是不是一种巧合呢?为此,我们用杠杆原理的办法再来证明一下梅涅劳斯定理!


在杠杆APB中,由杠杆平衡条件m_A\cdot AP = m_B\cdot PB,所以,设A点质量m_A=1,m_B=\alpha ,支点P的质量m_P=m_A+m_B = 1+\alpha 。
在杠杆ARC中,由杠杆平衡条件m_A \cdot AR = m_c\cdot RC,所以,C点质量m_C=\beta ,支点R的质量m_R = m_A+m_C = 1+\beta 。
在杠杆PRQ中,Q点重量等于支点R的质量减去一端P点的质量,所以Q点质量m_Q= m_R - m_P = (1+\beta ) - (1+\alpha ) = \beta -\alpha 。
在杠杆BCQ中,由杠杆平衡条件m_B\cdot BC = m_Q\cdot QC,而m_B=\alpha ,m_Q=\beta -\alpha ,所以BC:QC = \beta -\alpha :\alpha 。
于是\frac{AP}{PB} \cdot \frac{BQ}{QC} \cdot \frac{CR}{RA} = \alpha \cdot \frac{\beta -\alpha +\alpha }{\alpha } \cdot \frac{1}{\beta }=1。
证毕。
读者可以根据此方法模仿,自行推导证明塞瓦定理。(不知道塞瓦定理形式的,可以参看百度百科,也可以参看 《三角形中的三角形》一文)
至此,可以确定杠杆原理的正确性,至少针对开头问题的图形和梅涅劳斯定理的图形是正确的。那么,杠杆原理正确性的原因究竟是什么呢?其背后的理论又是什么呢?
我们都知道三角形内部有一个点叫做重心,它是三条中线的交点,重心在物理学上的意义是:物体处于任何方位时所有各组成支点的重力的合力都通过的那一点。规则而密度均匀物体的重心就是它的几何中心。不规则物体的重心,可以用悬挂法来确定。如此,我们就明白了,当我们在数学上处理一个三角形时,已经视作这个三角形是均匀的,这样重心就是几何重心,也就是三条中线的交点,这就是三角形重心之所以叫重心的缘由。
那么话又说回来了,如果三角形的三个顶点的质量不均匀,有大有小呢?此时,我们可以采用悬挂法,只需用两个顶点分别悬挂一次,得出两条重力线,其交点就是重心,这就是我们解决本文开头问题使用杠杆原理正确性的原因。BE和CD就是我们通过悬挂所得出来两条重力线,只不过我们是事先知道了两条重力线的位置,反过来求解三个顶点的质量而已。也就是说,对于题设的几何图形,当A点质量是2,B点质量是1,C点质量是2时,其重心位置就在W点。
由于任何一个物体的重心都可以用悬挂法来确定重心,因此杠杆原理可以使用在任何几何图形中,包括平面图形,不限于三角形、四边形等多边形,也适用于圆形、椭圆等曲线封闭图形,同样也包括立体图形,不限于四面体、正方体等多面体,也适用于球形、椭球型等曲面封闭几何体。
总结:本文以一个比例问题作为引子,论述了杠杆原理在几何中的应用,其背后的原理一点也不深奥,就是采用悬挂法求物体重心方法的逆向使用。只是我们在学校学习的时候,数学和物理是分开的,其中的交集,往往只限于数学对物理公式的演算以及对物理问题的数学建模,倒是很少把物理的知识用在数学上,但是我始终认为学科之间的知识并非独立的,而是相互联系,可以相互利用的,如果我们善于去思考其中的联系,往往会得出意想不到的方法来,本文希望给读者一种启发:万事万物都是相互联系的,我们要善于学会使用联系思考方式来解决问题。
文章被以下专栏收录