首发于 程序媛的算法笔记
切换模式

视觉slam | 相机与图像 内参 外参 单目 双目 RGD-B相机 投影模型 畸变 图像表示

梦寐mayshine
欢迎 大家加关注不迷路~ 工科生+文科生+艺术生
- 运动模型 x_{k+1}=f(x_k,u_k)+w_k
- 观测模型 z_{k,j}=g(x_k,y_j)+w_{k,j}
单目相机 - 针孔相机模型


- 投影坐标:
相似三角形,得:

通过对称映射,整理得:

- 像素坐标系:原点 o′ 位于图像的左上角, u 轴向右与 x 轴平行, v轴向下与 y 轴平行。像素坐标系与成像平面之间,相差了一个缩放和一个原点的平移。我们设像素坐标在 u 轴上缩放了 α 倍,在 v 上缩放了 β 倍。同时,原点平移了 [cx,cy]T
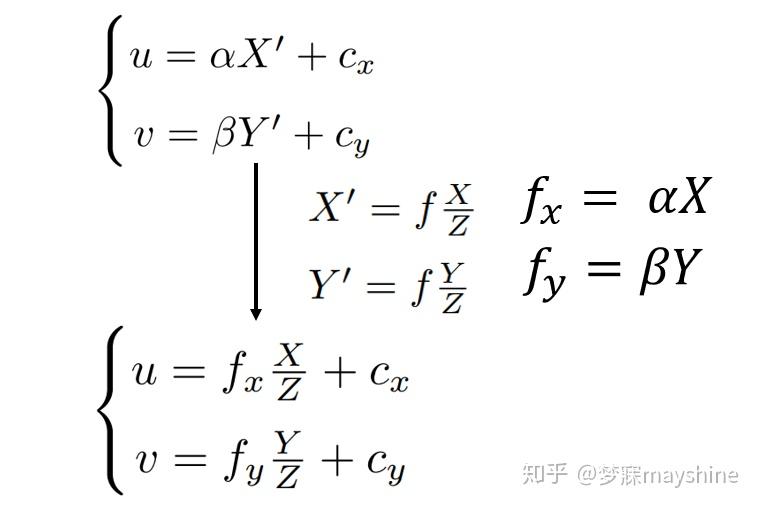

- 内参数矩阵K (fx fy cx cy) 通常在相机生产时已经固定(相机坐标系)




- 外参数 - (世界坐标系)
世界坐标系 ->相机坐标系 Tcw * Pw = Pc / RPw + t = Pc ->归一化平面




- 世界坐标系:固定点P:Pw,
- 相机坐标系:相机运动,由R,t变化描述,Pc=RPw+t
- 归一化相机坐标:投影到归一化平面Z=1上,得到归一化相机坐标Pc=[X/Z,Y/Z,1]T
- 像素坐标:乘以内参矩阵Puv=KPc
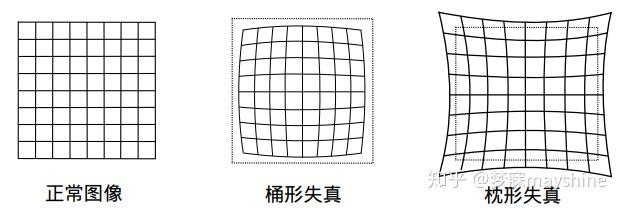
相机畸变
- 由透镜形状引起的畸变称之为径向畸变:桶形畸变和枕形畸变



在相机的组装过程中由于不能使得透镜和成像面严格平行也会引入切向畸变
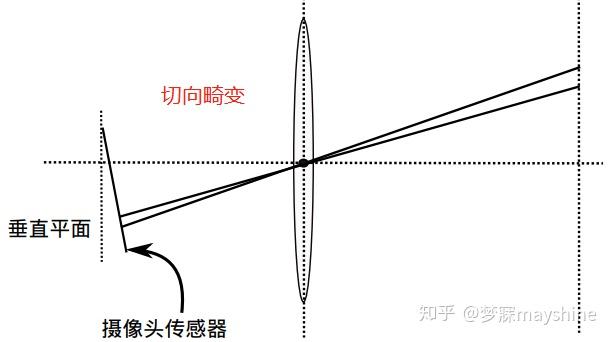



- 径向畸变+切向畸变


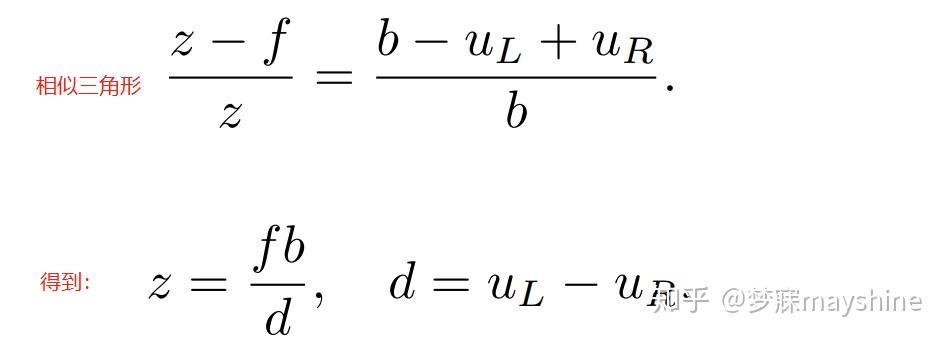
双目相机





RGB-D相机
- 返回RGB图 + 深度图Depth
- 通过红外结构光(Structured Light)来测量像素距离的。例子有 Kinect 1 代、 Project Tango 1 代、 Intel RealSense 等
- 通过飞行时间法(Time-of-flight, ToF)原理测量像素距离的。例子有 Kinect 2 代和一些现有的 ToF 传感器等


图像


发布于 2019-11-29 06:14
图像
计算机视觉
同时定位和地图构建(SLAM)
文章被以下专栏收录

程序媛的算法笔记
